|
Sensor Fusion
- Global time allows a global interpretation of measurements
- Time-triggered schedule supports coordinated distributed
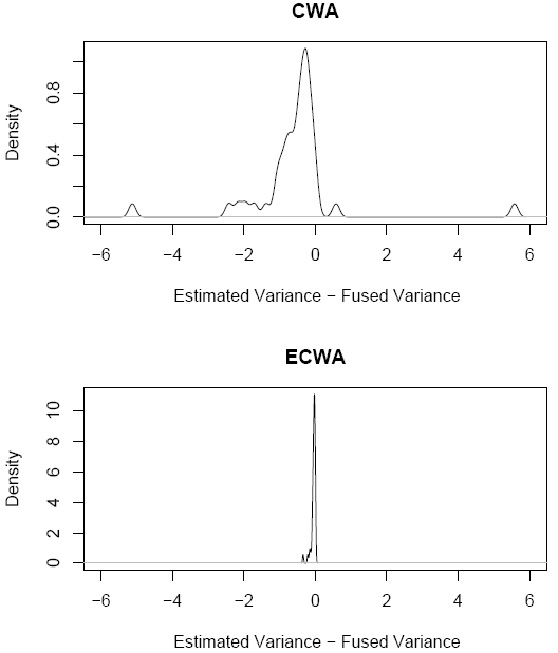
- Two simple algorithms for raw sensor fusion:
- Confidence-Weighted Averaging
- Extended Confidence Weighted Averaging
|
|
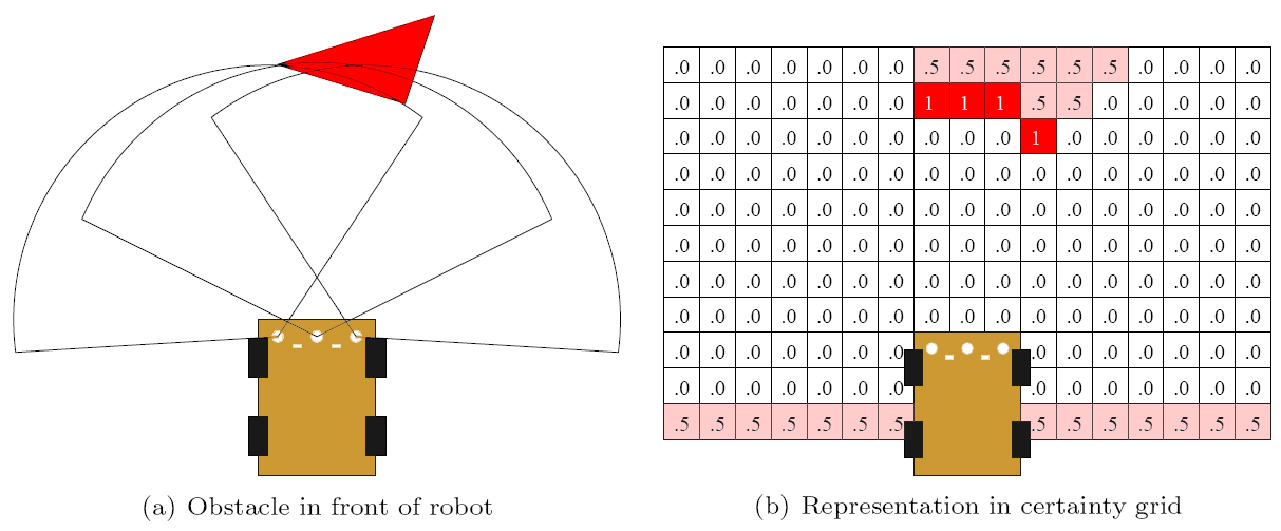
Robust certainty grid is a fusion algorithm combining distance measurements into a grid-like representation
Computer-Aided Configuration
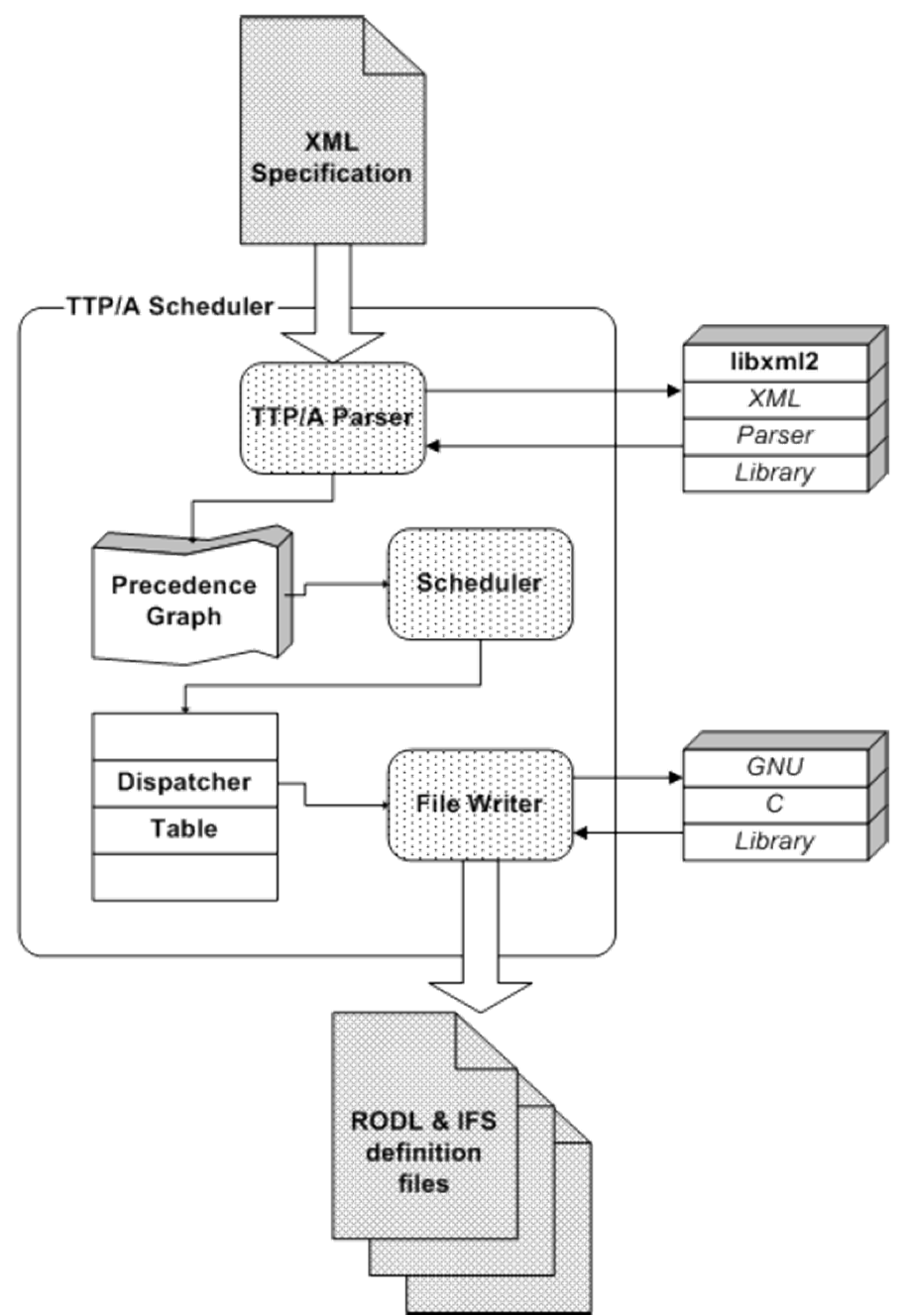
- In a time-triggered system all communication and computation activities have to be defined a priori
- Idea: Liberate system designers from the burden of monotone and error prone task
- Formalized model of components in XML
- Formalized model of application in XML
- Computer automated generation of schedules and code stubs
|
 |
Robot Testbeds
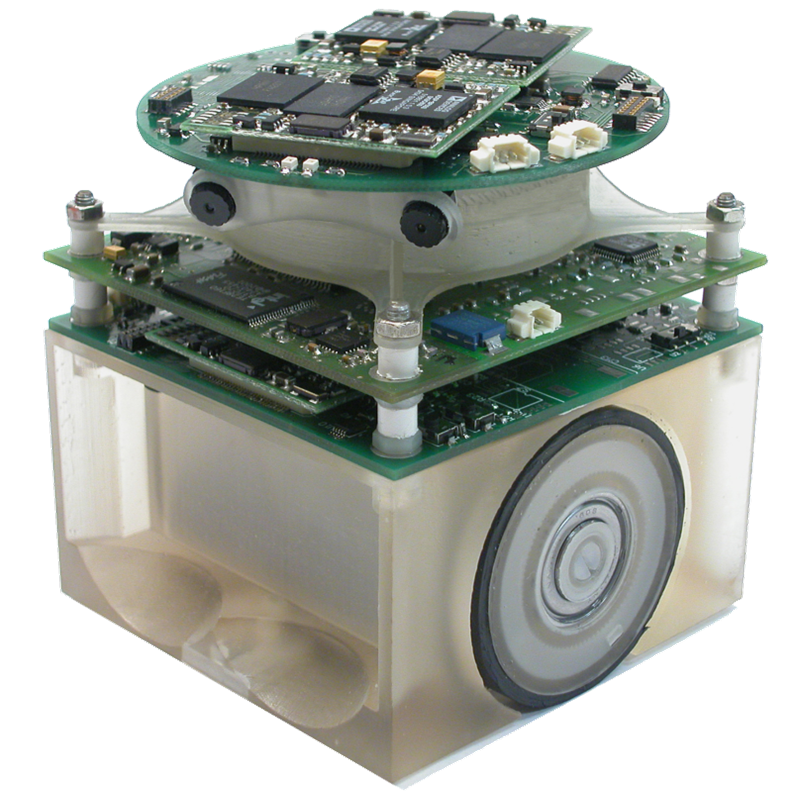
- TINYPHOON: Small autonomous and mobile robot in the shape of a cube with a side length of about seven centimeters
- Different components (vision unit, decision unit, motion unit)
- Platform serves as a testbed for generic timetriggered protocol (TTP/A)
|
 |
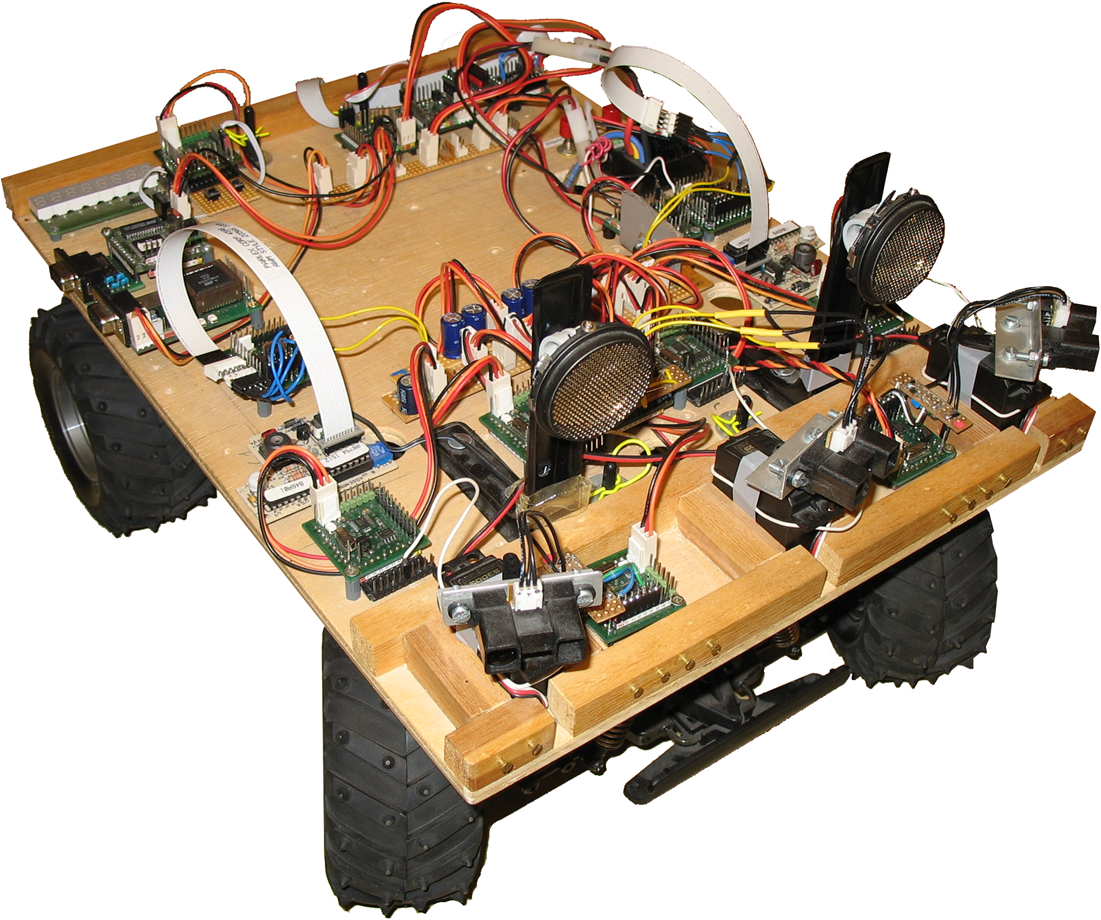 |
Smart Car autonomous robot with distributed control
6 smart sensors
5 smart actuators
Testbed for configuration tools
Data creation for sensor fusion evaluation
Testbed for robust certainty grid
|
- Robot Soccer Simulator official robot soccer simulation platform
- Testbed for self-organizing multi-robot scenarios
|
 |
Self-organizing Cooperating Robots
- Self-organizing communication strategies between
cooperating robots will adapt to breakdown of a robot,
disruptions of the (wireless) communication system and
inconsistent information
- Self-organizing behavior cannot be designed in a straightforward way
- Design approach:
- Genetic evolution of desired behavior
- Fitness function is derived from performance in simulation of target application
Final Report
W. Elmenreich: Time-Triggered Communication Architecture for an Autonomous Mobile Robot System; Public final project report, Alpen-Adria-Universitðt Klagenfurt, 2009
|

